Bathymetric Survey
Bathymetric Survey
Description
Bathymetric mapping refers to construction of ocean and sea maps—bathymetric maps (BM). Bathymetric maps represent the ocean (sea) depth depending on geographical coordinates, just as topographic maps represent the altitude of Earth's surface at different geographic points. Bathymetric maps are critical to submarine navigation, submarine evasion tactics, and in predicting the location of ocean signal channels.
The most popular kind of bathymetric maps is one on which lines of equal depths (isobaths) are represented. Like geographical maps of the surface of Earth, bathymetric maps are constructed in definite cartography projection. Mercator projection is used perhaps more often in constructing bathymetric maps, and has been used for a long time in constructing sea charts that are used for sailing in all latitudes except Polar ones.
The creation of a bathymetric map of a given region depends above all on the amount of depth measurement data for that region. Before the invention of the echosounder in the 1920s, ocean (sea) depth could be measured only by lead. Such measurements were quite rare; these measurements were made only in isolated points, and creation of bathymetric mapping was practically impossible. Thus, the structure of the ocean floor was virtually unknown. It should be noted, for example, that the most important structure in the Atlantic Ocean, the Middle-Atlantic ridge, was discovered and began to be investigated only after World War II. Another important factor for creating bathymetric mapping is determining geographical coordinates of the point where the depth measurement is made. It is evident that when these determinations are more precise, then the maps are better. As of 2003, the GPS (Global Positioning System) is used for determining the coordinates of the measurement points.
When constructing topographic maps of land, one can always measure the altitude of any point of the surface precisely. However, when constructing a bathymetric map, it is practically impossible to determine the exact depth of any point of the bottom of the sea. Obviously, bathymetric maps are more precise when more data of depth measurement per surface area unit in the given region are available. Currently, the most precise and detailed bathymetric maps result from using data from multibeam echosounding. The multibeam echosounder is a special kind of echosounder, which is located on board of the vessel and measures the depth simultaneously in several points of the bottom. These points are located on the straight line perpendicular to the vessel track. These points themselves are determined by the reflection of several acoustical pulses (beams) directed from one point at different angles to the vertical. The determination of depth in this method is performed regularly within periods of several seconds during the vessel motion. The measurement data are stored in a computer, and using them the map of an isobath of narrow bottom stripe can be represented periodically, or these data can be represented on a monitor.It should be noted that in addition to the multibeam echosounder, other devices that measure depths simultaneously in several points of the ocean bottom have been developed, but all of them are based on the reflection of sound signals from the bottom.
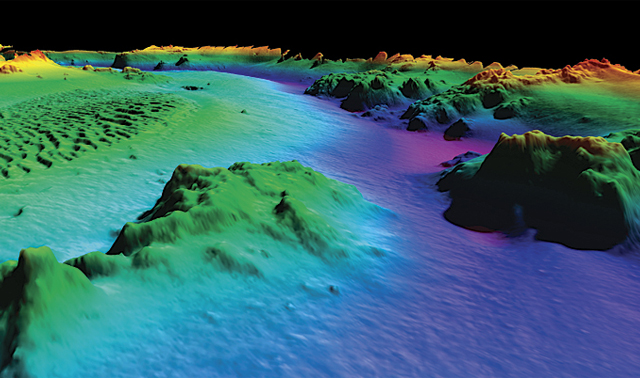
If there are a lot of measurement data (more precisely this means that the average amount of measurement data per surface area unit is relatively big, and the measurement points themselves are located uniformly on the surface investigated), then computer methods of isobath construction are used. In this case, two stages of the work are executed: first using the measurement data obtained in arbitrary points of the surface, the values of the depth in knots of a regular grid are calculated (sometimes this stage is known as digital surface model construction), and then using these grid values, coordinates of different isobaths are determined (grid values are used also for other forms of bathometric mapping representations, 3-D views, for example). There are many algorithms of digital model creation, such as the least mean square method, and the so-called Kriging method, as well as algorithms of constructing an isobath of its own using depth grid values. To construct a precise map of the region it is necessary to perform echosounding surveying on it in such a manner that map stripes, obtained in different vessel tracks, would be as close to each other as possible, or even overlap. After performing such surveying, all data are joined together, and the map of the entire region is constructed.